
Magnetische Levitation auf die einfache Art
über

Zwei ähnliche DIY-Magnetschwebeprojekte von Peter Neufeld wurden schon im letzten Jahr auf Elektor Labs vorgestellt. In beiden Fällen schwebt ein Lego-Männchen in der Luft. Beide funktionieren nach dem gleichen Prinzip: Die Stärke eines Magnetfeldes zwischen einem Elektromagneten und einem Neodym-Magneten wird mit einem Hall-Sensor gemessen und der Elektromagnet abhängig von diesem Messwert gesteuert. Der Unterschied zwischen den Projekten liegt in der Steuerschaltung. In einem Projekt wird der Magnet von einem Mikrocontroller-Modul M5Stack Atom ESP32 Pico gesteuert, der andere Entwurf, der hier beschrieben wird, ist „hardware only“ und verwendet zur Steuerung nur einen analogen Komparator.
Von Peter Neufeld und Luc Lemmens (Elektor)
Auf Wikipedia wird Levitation beschrieben als „das freie Schweben eines Objektes. Dazu wird mithilfe einer Kraft die wirkende Gewichtskraft kompensiert und ein Objekt im Raum positioniert, wobei kein direkter Kontakt zum Boden oder zu festen Objekten besteht“. Auf das Objekt wird also eine nach oben gerichtete Kraft ausgeübt, die der Erdanziehungskraft entspricht. Wenn man ein elektronisches Schwebeprojekt entwerfen möchte, kann dies beispielsweise durch einen Elektromagneten geschehen. Theoretisch wäre auch eine Konstruktion aus zwei Permanentmagneten möglich, aber da es in der realen Welt alle möglichen störenden Einflüsse gibt, die dieses instabile Gleichgewicht stören könnten, werden in der Praxis Elektromagnete verwendet. Ein Regelkreis kann dabei dann die Stärke des Magnetfeldes variieren, um das schwebende Objekt in Position zu halten. Dies erfordert eine Art Rückmeldung über die Position des schwebenden Objekts, und in den beiden auf den ElektorLabs-Seiten vorgestellten Projekten wird ein Hall-Sensor verwendet, um die Stärke des Magnetfelds zwischen einem fest positionierten Elektromagneten und einem darunter schwebenden Permanentmagneten zu messen. Die Ausgangsspannung dieses Sensors wird als Maß für den Abstand zwischen der beiden Magneten verwendet. Der Begriff „Regelkreis“ lässt aufwendige, recht komplexe Berechnungen und Schaltungen vermuten, um ein stabiles Regelsystem zu realisieren, aber die Projekte von Peter Neufeld zeigen, dass es nicht immer kompliziert sein muss.
Levitation-Projekte, bei denen Objekte einfach in der Luft schweben, sind immer faszinierende Hingucker. Es sieht aus, so als ob die Gesetze der Schwerkraft für das schwebende Objekt nicht mehr gelten, was natürlich nicht der Fall ist. Ich fand es ziemlich außergewöhnlich, dass dies mit so wenig Elektronik möglich war. Die meisten anderen DIY-Leviationen, die ich vor Peters Projekten gesehen hatte, sahen viel schwieriger zu bauen aus, oft mit selbstgewickelten Spulen, und erforderten hohe Ströme. Die Videos von Peter haben aber bewiesen, dass seine Projekte funktionieren, auch wenn es einiges an Präzision und Geschicklichkeit braucht, um die Kalibrierung richtig hinzubekommen. Glauben Sie nicht? Einfach mal ausprobieren!
Dieser Artikel konzentriert sich zunächst darauf, wie die Levitation überhaupt funktioniert und stellt dann das einfachste von Peters Projekten, genannt „easy way“, mit einem Analogkomparator zur Steuerung des Elektromagneten vor. In einem folgenden Artikel wird die Version mit dem M5Stack Atom ESP32 Pico behandelt, die mehr Wert auf die „Kosmetik“ legt, um ein schön anzuschauendes Levitationsgerät zu schaffen.
Hardware für die analoge Version
Der Schaltplan in Bild 1 zeigt, dass tatsächlich nur sehr einfache Hardware benötigt wird, um dieses Projekt zu bauen.
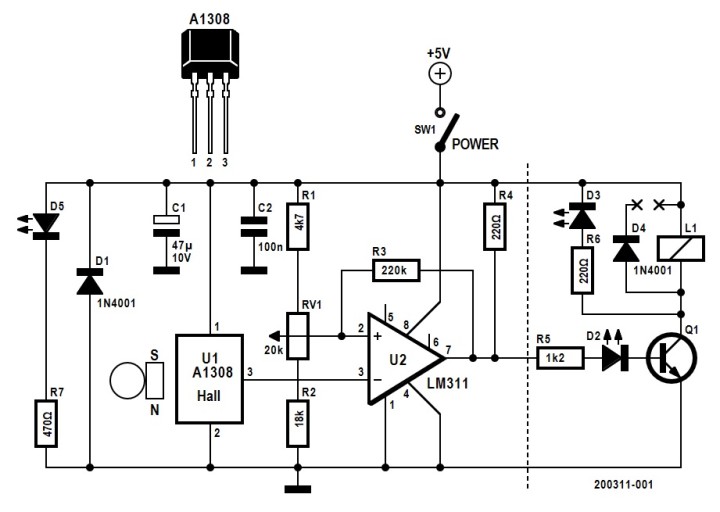
L1 stellt die Spule eines Relais dar, wobei der Schaltmechanismus entfernt wurde. Sie ist Teil einer fertigen Standard-Relaisplatine, die mit dem Kern nach unten an einem Rahmen befestigt ist, unter dem das mit einem Permanentmagneten ausgestattete levitierte Objekt schwebt.
R6 und LED3 ersetzen die Freilaufdiode D4 und dienen als optische Anzeige während der Kalibrierung der Levitationsschaltung. Der Hallsensor U1 ist auf dem Kern montiert und misst das Magnetfeld zwischen L1 und dem schwebenden Objekt. Der Sensorausgang ist mit dem invertierenden Eingang des Komparators U2, einem LM311, verbunden. Der nicht-invertierende Eingang von U2 ist mit dem Schleifer des Mehrgang-Trimmpotis RV1 verbunden, an dem der Regelkreis abgeglichen wird. R3 sorgt für eine kleine Hysterese des Komparators. Der Ausgang des Komparators schaltet über Q1 die Spule ein, wenn die Spannung am Ausgang des Hallsensors niedriger ist als der voreingestellte Wert am Schleifer von RV1.
Die LED D5 ist die Einschaltanzeige und SW1 der An/Aus-Schalter. D1 ist eine Klemmdiode zum Schutz der Schaltung, wenn die Versorgungsspannung versehentlich verkehrt herum angeschlossen wird.
Beschaffung der (richtigen) Bauteile
Die meisten Teile in Schaltplan und Stückliste sind Standardbauteile, nur die Hall-Sensoren A1302 oder A1308 von Allegro erwiesen sich als etwas schwieriger zu beschaffen. Billigere und weiter verbreitete Sensoren wie der SS49 funktionierten in den frühen Versuchen von Peters Levitation-Projekten nicht, wahrscheinlich weil das Ausgangssignal nicht schnell genug reagiert, wenn sich die Magnetfeldstärke ändert, aber das wurde nicht weiter untersucht.
Überraschenderweise war das am schwierigsten zu beschaffende Teil die Platine mit dem Relais, das zu einem Elektromagneten umgebaut wird. Solche Module sind im Internet in Dutzenden von Maker- und Arduino-Webshops leicht erhältlich und es sollte doch kein Problem sein, eines zu finden und zu kaufen. Peter hatte Boards mit der Bezeichnung HW-482 mit den Relaistypen JQC-3FF-S-Z und JQC3F-05VDC getestet. Ich habe (wieder einmal) eine sehr wichtige Lektion beim Einkaufen im Internet gelernt: Traue niemals Fotos in Webshops! Ich sah mir die Fotos an, die Peter mir geschickt hatte, und fand genau die gleiche Platine bei Amazon. Ich erhielt aber Module mit der Platine mit der Bezeichnung HW-307, die ein Relais mit der Typennummer FL-3FF-S-Z tragen. Sie funktionieren wie beschrieben und im Shop versprochen, das heißt, als 5-V-SPDT-Relais-Board mit Treibertransistor, Freilaufdiode und Anzeige-LEDs. Allerdings entpuppte sich der Transistor auf dieser Platine als ein PNP-Typ, im Gegensatz zu dem NPN auf den von Peter getesteten Relaisplatinen. Ich habe es trotzdem ausprobiert, denn bis auf den Typ und die Marke sah das Relais dem im ursprünglichen Projekt verwendeten sehr ähnlich, und wie sich später herausstellte, auch im Inneren. Immerhin sind für dieses Projekt nur die Spule und der Kern des Relais wichtig.
Für die Magnete wurde ein Stapel von zwei oder drei scheibenförmigen Neodym-Magneten mit einem Durchmesser von 8 mm bis 12 mm und einer Dicke von 2 mm bis 3 mm geordert. Die Größe und Anzahl der benötigten Magnete hängt auch von den Maßen des Lego-Püppchens oder einer anderen Last ab. Ich habe mit einem Stapel von nur zwei Magneten begonnen, beide mit einem Durchmesser von 10 mm und einer Höhe von 2 mm, und ich würde empfehlen, mit einem solch einfachen Objekt zu experimentieren, um ein Gefühl dafür zu bekommen, wie man den Regelkreis einstellen muss. Es kann nützlich sein, die Oberseite des Magnetstapels mit einem Permanentmarker oder einem Stück Klebeband zu markieren, um es stets richtig auszurichten. Sobald Sie das hinbekommen haben, können Sie mit anderen Magneten und dem Hinzufügen von Objekten experimentieren. Natürlich gibt es Grenzen für die Größe und das Gewicht der Last, die mit dieser Hardware schweben kann. In diesem Artikel bezieht sich der Begriff „Magnet(e)“ stets auf die komplette Last, also den Stapel von Magneten plus optionaler Last.
Aufbau
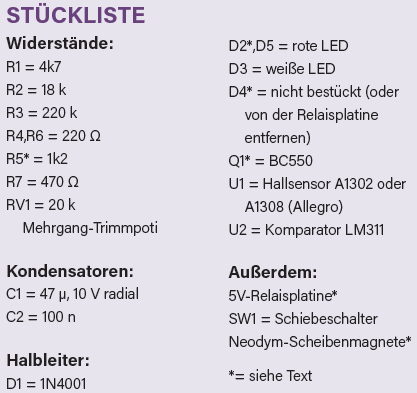
Es ist keine speziell entworfene Platine für dieses Projekt erforderlich, ein einfaches Stück Lochraster oder Veroboard oder sogar ein Breadboard ist für die wenigen Bauteile ausreichend. Bild 2 zeigt, wie die Bestandteile des ursprünglichen Prototyps zusammengesetzt waren.
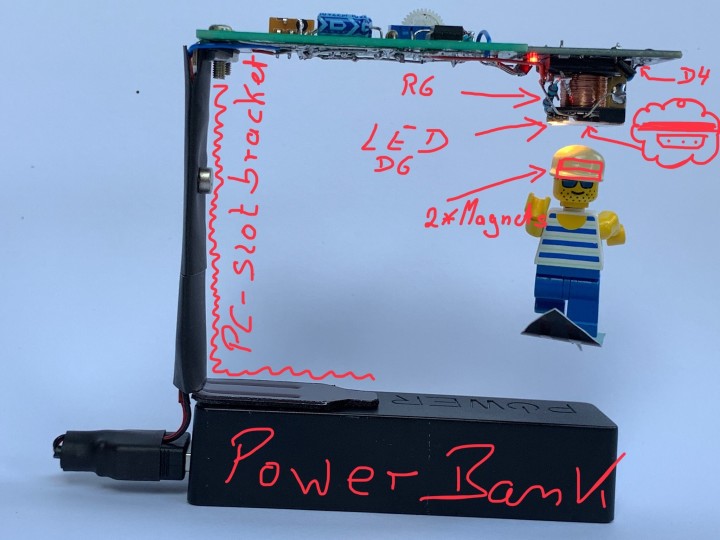
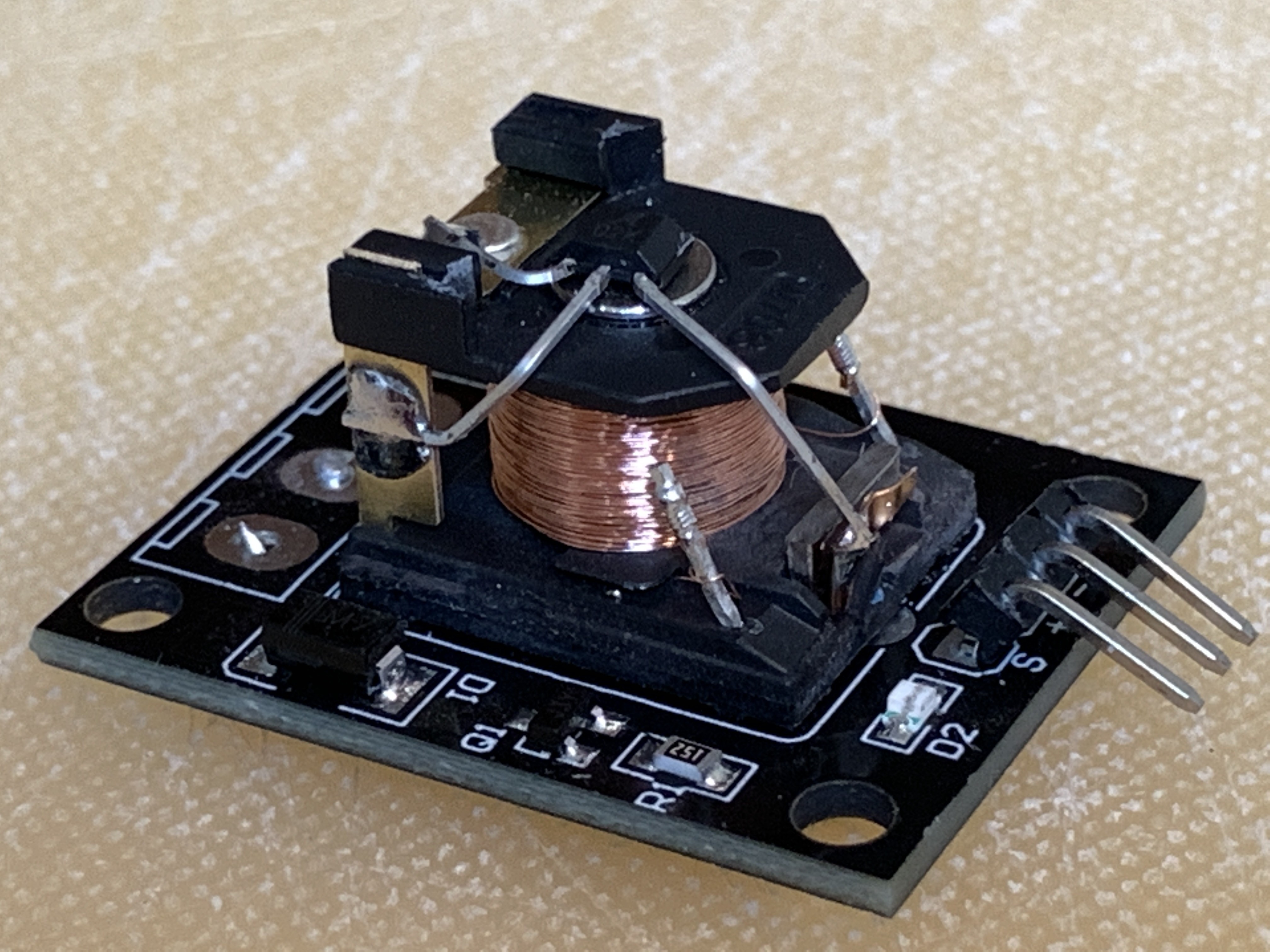
Der Aufbau beginnt mit einem Abbau: Der 3-polige Block mit den Platinenanschlussklemmen wird von der Relaisplatine ausgelötet, um mehr Bewegungsfreiheit für die Arbeiten am Relais zu erhalten. Schauen Sie sich Peters Fotos in Bild 3 genau an, um zu sehen, wie mit dem Relais umzugehen ist. Entfernen Sie die Abdeckung und den größten Teil des Schaltmechanismus‘; nur die Spule und der Kern sind für uns wichtig. Kürzen Sie den U-förmigen Kern auf eine J-Form, um einen Kurzschluss des Magnetfelds zu vermeiden. Um die Metallteile zu schneiden, könnte sich eine Art kleine Schleifscheibe auf einem Dremel-Werkzeug als nützlich erweisen.
Unabhängig davon, welche Art von Relaisplatine Sie haben, muss die Freilaufdiode D4 entfernt und durch R6 und die weiße LED D3 ersetzt werden. Bei Peters Relaisplatine ist damit der rechte Teil des Schaltplans in Bild 1 einschließlich Q1, R5 und D2 abgehandelt. In meinem Fall habe ich nur die Relaisspule behalten, alle anderen Bauteile entfernt und diesen Teil der Schaltung mit bedrahteten Bauteilen neu aufgebaut. Für die Ansteuerung der Relaisspule reicht für Q1 ein BC550 oder ein anderer Standard-NPN-Transistor aus. Im Nachhinein betrachtet wäre es sinnvoller gewesen, nur das Relais zu kaufen, aber diese kleinen, in Massenproduktion hergestellten Relaismodule sind wahrscheinlich billiger als ein passendes separates Relais.
Bitte beachten Sie, dass die Bauteilbezeichnungen (L1, R5, D2 Q1 und D4) auf der Relaisplatine nicht mit denen im Schaltplan übereinstimmen. Es dürfte jedoch nicht allzu schwierig sein, die zu entfernende Freilaufdiode D4 zu identifizieren.
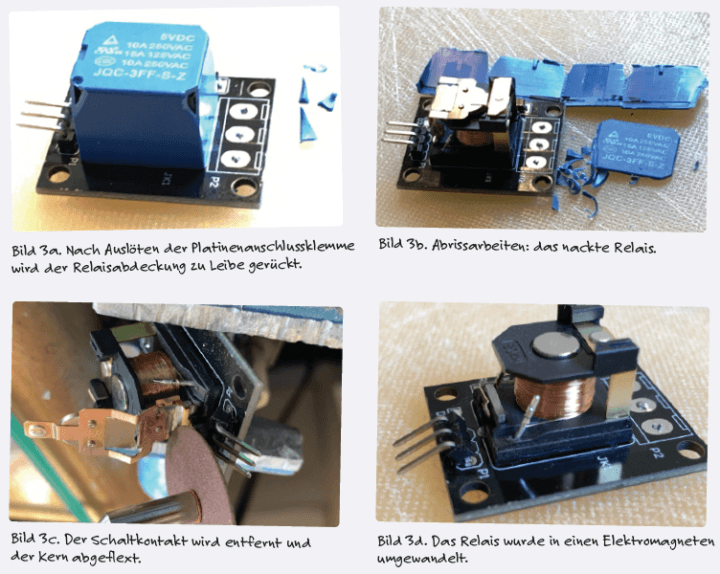
Der Hallsensor wird direkt und mittig auf dem Kern der Spule positioniert (Bild 4). Kleben Sie ein dünnes Stück Kunststoff über den Sensor und seine Pins, um einen Kurzschluss der Stromversorgung zu verhindern, wenn der Magnet an den Kern herangezogen wird.
Der Auf- und Zusammenbau der Schaltungen ist nicht allzu schwierig, beachten Sie aber, dass die Verdrahtung der Spule und die Ausrichtung des Permanentmagneten und des Hallsensors sehr wichtig sind, damit die Magnet-Levitation funktioniert:
- Wenn sich der Permanentmagnet der Spule und dem Hallsensor nähert, muss sich die Ausgangsspannung des Sensors erhöhen.
- Wenn die Spule eingeschaltet wird, muss ihr Magnetfeld den Magneten anziehen.
Wenn eine oder beide dieser Bedingungen nicht erfüllt sind, funktioniert es nicht. Die erste Bedingung lässt sich leicht überprüfen, indem man die Ausgangsspannung des Hallsensors mit einem Multimeter misst. Gegebenenfalls muss man einfach den Magneten umdrehen, wenn die Spannung bei Annäherung von Sensor und Permanentmagnet sinkt statt steigt. Und die zweite ... Ich konnte die Kraft zwischen der stromführenden Spule und dem Magneten doch fühlen, das schien in Ordnung zu sein.
Es sah so aus, als ob die Steuerschaltung, die ich gebaut hatte, richtig funktionierte, da beide LEDs leuchteten, wie sie sollten: D2, wenn die Spule eingeschaltet ist, D3 blinkte bei ausgeschalteter Spule, wenn der Magnet sich der Spule nähert. Es sollte nur eine Sache der Einstellung von Trimpoti RV1 sein, um die richtige Spannungseinstellung am nicht-invertierenden Eingang des Komparators zu erhalten, um den Magneten am Lego-Püppchen wie im Video schweben zu lassen. Aber meine Bemühungen waren vergeblich: Der Magnet hing sich einfach an die Spule auf oder folgte der Gravitation auf die Tischplatte.
Dann erinnerte ich mich an die zweite Bedingung, damit die Levitation funktioniert. Ich konnte definitiv spüren, dass der Magnet zwischen meinen Fingern von der Spule angezogen wurde, wenn sie mit Strom versorgt wurde. Das sollte doch in Ordnung sein. Oder doch nicht?
Wenn alles fehlschlägt: RTFM
Zuerst überprüfte ich die Stärke des Magnetfeldes der Spule. Zu meiner Überraschung stellte ich fest, dass ihre elektromagnetische Kraft fast vernachlässigbar zu sein schien: Direkt mit einer 5-V-Versorgung versorgt, konnte sie kaum den kleinsten Eisengegenstand anheben. Nicht gerade die Art von Kraft, die man erwarten würde, um etwas hochzuheben, geschweige denn eine Kraft, die stark genug ist, um eine relativ schwere Last wie einen Magneten und einen daran befestigten Gegenstand schweben zu lassen. Ich habe hier etwas sehr Wichtiges übersehen: Auch wenn die Spule nicht mit Strom versorgt wird, gibt es ja noch die statische Magnetkraft zwischen dem Permanentmagneten der Last und dem Metallkern der Spule. Und diese Kraft ist aber viel stärker als die elektromagnetische Kraft der Spule. Der Trick ist also: Wenn sich der Dauermagnet dem Kern nähert, gibt es einen Punkt, an dem die statische Kraft einfach nicht stark genug ist, um den Magneten zum Kern zu ziehen. Hier kommt das zusätzliche elektromagnetische Feld ins Spiel: Die Spule fügt dem statischen Feld nur eine kleine Kraft hinzu, gerade stark genug, um den Magneten nach oben zu ziehen. Das vom Hallsensor gemessene Magnetfeld nimmt zu (und damit auch seine Ausgangsspannung), wenn sich der Magnet dem Kern nähert, wodurch bei korrekter Einstellung von RV1 die Spule abgeschaltet und verhindert wird, dass der Magnet vollständig zum Kern gezogen wird. Die Schwerkraft zieht den Magneten dann nach unten, wodurch das vom Sensor gemessene Feld sinkt und die Spule wieder eingeschaltet wird - und so weiter.
Was ich also falsch gemacht habe: Da das elektromagnetische Feld im Vergleich zum statischen Magnetfeld sehr schwach ist, konnte ich nicht sagen, ob die eingeschaltete Spule den Magneten anzieht oder abstößt. So ermittelte ich mit einem altmodischen Kompass, ob die Ausrichtung des elektromagnetischen Feldes korrekt war, um die zweite Bedingung für den Schwebeflug zu erfüllen. Als ich Peters Dokumentation erneut las, sah ich, dass er eine einfache Lösung erwähnte, um die richtige Ausrichtung der Spule zu finden: Die Ausgangsspannung des Hallsensors steigt nicht nur an, wenn sich der Permanentmagnet nähert, sondern auch, wenn die Spule mit Strom versorgt wird (zum Beispiel durch Verbinden des Kollektors von Q1 mit GND). Sie müssen also unter Umständen die Anschlüsse der Spule und der LED D3 vertauschen, um die richtige Ausrichtung zu erhalten.
Abgleich mit Fingerspitzengefühl
Wie bereits erwähnt, erfordert es Präzision und Fingerspitzengefühl, um den Punkt zu finden, an dem die Last schwebt, irgendwo im Abstand zwischen Spule und Last von 10 mm bis 15 mm. Peter beschreibt ein Verfahren mit einem Stapel von Notizzetteln, um den richtigen Abstand für die Kalibrierung zu finden, aber aus irgendeinem Grund - wohl wegen meines Mangels an Präzision und Geschicklichkeit - hat das bei mir nicht funktioniert. Mein Trick war, den Magneten auf meine Hand zu legen und sie ganz langsam in Richtung der Spule zu heben, bis ich spüren konnte, dass die Magnetkraft sie anzieht. Wenn die Spule abschaltet, bevor dieser Punkt erreicht ist, stellen Sie RV1 auf einen höheren Schwellenwert am nicht-invertierenden Eingang des Komparators ein, oder auf einen niedrigeren Pegel, wenn sie nicht abschaltet, bevor der Magnet zum Kern hochgezogen wird. Die weiße LED leuchtet kurz auf, wenn die Spule abgeschaltet wird. Stellen Sie das Potentiometer so ein, dass diese LED scheinbar ständig leuchtet (tatsächlich blinkt sie mit der Steuerfrequenz des Magneten). Am Anfang wird der Magnet wahrscheinlich am Kern kleben bleiben, aber wenn Sie den Dreh erst einmal raus haben, wird es immer einfacher, die Kalibrierung für andere Lasten richtig hinzubekommen. Bei meinem Aufbau konnte ich dann sogar am Schalten des Regelkreises hören, wenn die richtige Einstellung erreicht ist. Und ja: Es kann einige Zeit dauern, bis man es richtig hinbekommt, aber nur Mut, Sie können es schaffen!
Meine erste Absicht war es, einen Prototyp zu bauen, der mindestens so gut aussieht wie der des Autors, aber mit all den Änderungen, die ich vornehmen musste, um ihn zum Laufen zu bringen, bin ich in dieser Hinsicht völlig gescheitert, wie man in Bild 5 sehen kann.
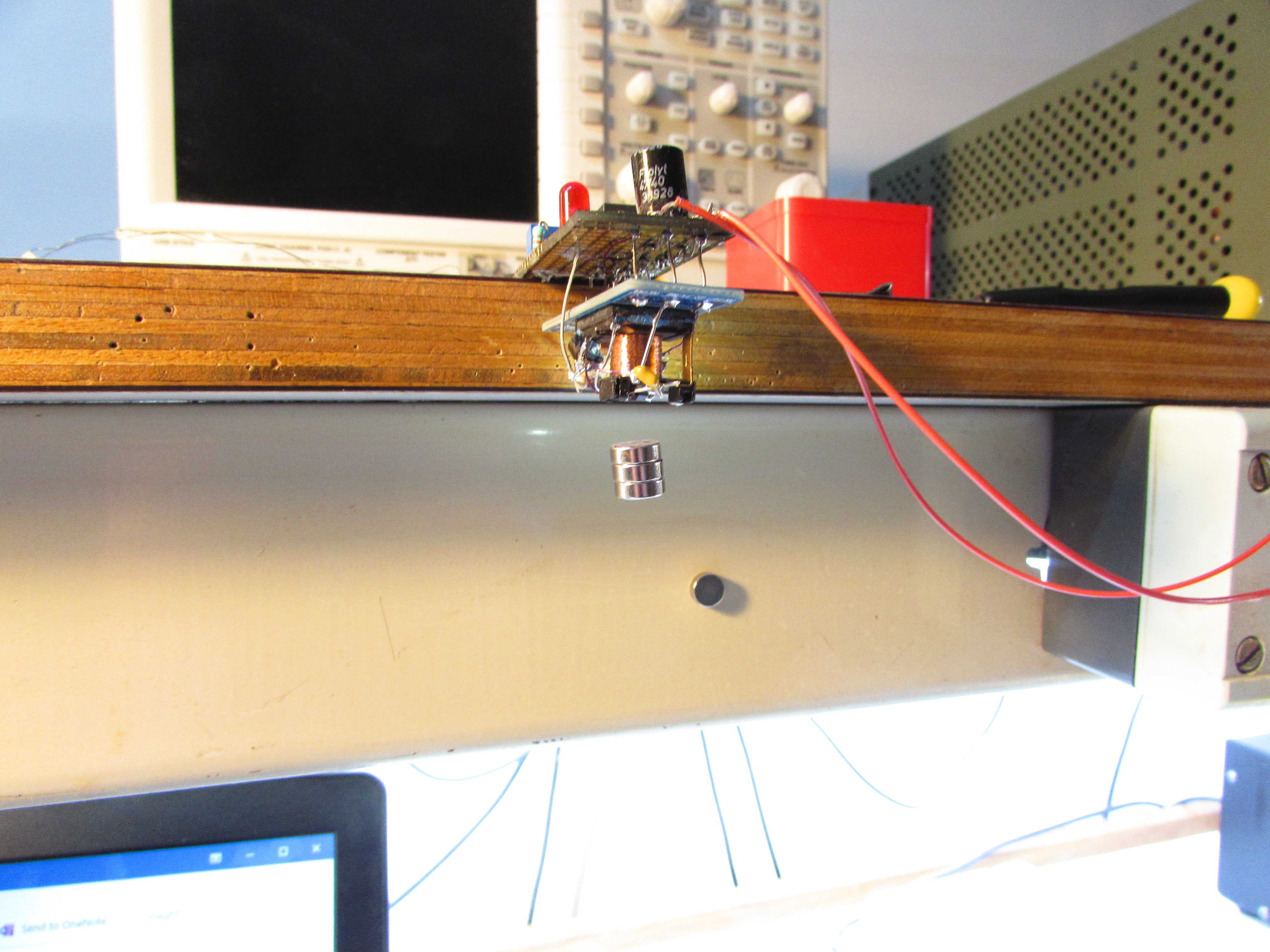
Aber mein Hauptziel habe ich erreicht: Ich habe die Levitationstechnik zum Laufen gebracht! Eines Tages, wenn mir die Ideen ausgehen, was ich mit meiner Freizeit anfangen soll ... Aber ich will mich mehr um die Kosmetik bemühen, wenn ich das zweite Levitationsprojekt von Peter Neufeld, der digitalen Lösung, aufbaue. Mit den Lektionen, die ich bei diesem „einfachen“ analogen Aufbau lernen musste, sollten beim nächsten Projekt die meisten Fallstricke vermieden werden. Dann bleibt mir mehr Zeit, um mich um ein gefälliges Äußeres zu kümmern!
(200311-02)
Ein Beitrag von
Entwurf: Peter Neufeld
Text und Bearbeitung: Luc Lemmens
Illustrationen: Peter Neufeld, Patrick Wielders, Luc Lemmens
Übersetzung: Rolf Gerstendorf
Layout: Giel Dols, Harmen Heida
Haben Sie Fragen oder Kommentare?
Haben Sie technische Fragen oder Kommentare zu diesem Artikel? Wenden Sie sich bitte an die Redaktion unter luc.lemmens@elektor.com!
Diskussion (1 Kommentar)