
Vom Strohhalm zum Roboter
über
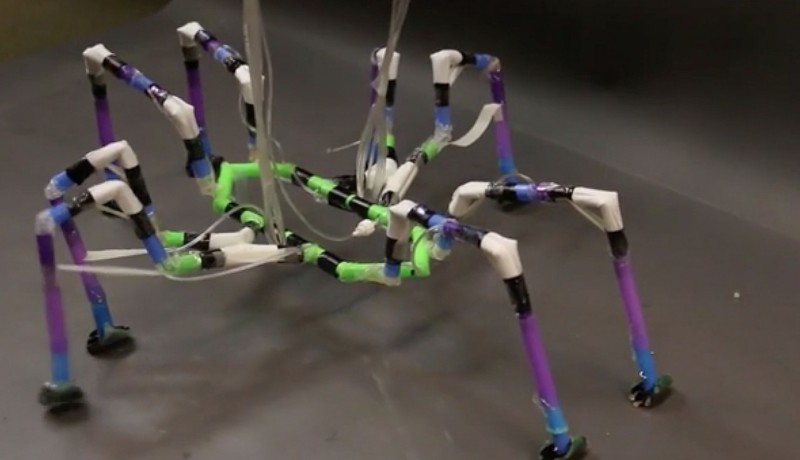
Soft-Robots sind Roboter, die in Konstruktion und/oder Materialien von den Lebewesen der Natur inspiriert sind. Die erste Generation von Soft-Robots war noch ziemlich unbeholfen. Sie bewegten sich z.B. indem bestimmte Luftkissen in bestimmter Ordnung aufgeblasen und abgelassen wurden. Neuer Modelle bewegen sich schon viel natürlicher. Die Entwickler dieser Arthrobots, die Forscher George Whitesides und Alex Nemiroski, ließen sich durch Insekten und Spinnen inspirieren. Diese können sich nicht nur schnell fortbewegen und auch überall hinaufklettern, sondern auch Dinge, die für größere „harte“ Roboter unmöglich sind.
Strohhalme
Die Frage, wie das natürliche Verhalten nachgemacht werden kann, wurde durch die Verwendung von gewöhnlichen Strohhalmen beantwortet, wie man sie für das Trinken von Limonade etc. verwendet. Diese Kunststoff-Röhrchen haben ein ausgezeichnetes Gewichts/Belastbarkeits-Verhältnis und erlauben so, diese Art Roboter zu entwickeln
Als Erstes wird eine Kerbe am Strohhalm angebracht, sodass er biegbar wird. Dann wurde da ein kleiner Ballon eingeführt, der durch Aufblasen das Bein strecken kann. Ein elastisches Band gewährleistet, dass sich das Bein wieder biegt, wenn sich der Ballon entleert.
Zunächst wurden so einbeinige Roboter gebaut, die auf diese Weise kriechen konnten. Dann folgten zwei-, drei- und mehrbeinige Exemplare. Die ersten Ausführungen wurden noch per Hand (mit Spritzen als pneumatisches System) bedient; doch für das sechsbeinige Exemplar ist leicht einsehbar eine Steuerung per Mikrocontroller notwendig. Die Arduino-Lösung steuert Ventile und einen zentralen Kompressor.
Obwohl die Strohhalm-Roboter haben keinen direkten praktischen Nutzen haben, kann die Technik der Verwendung von Alltagsmaterialien durchaus inspirierend für weitere Innovationen sein.
Video: Joe Sherman / Whiteside Group
Diskussion (0 Kommentare)