
Arduino-gesteuerte Zeichenroboter (Kritik)
über
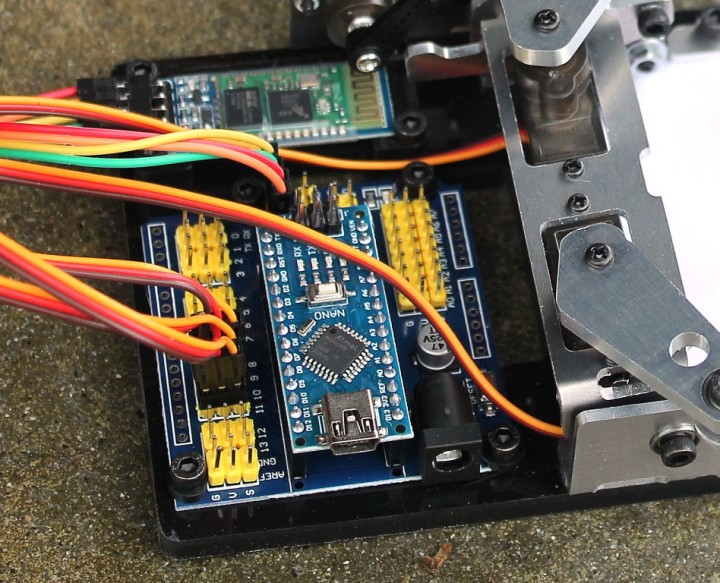
Der Arduino-gesteuerte Zeichenroboter ist ein kostengünstiger Pen-Plotter, mit dem sich kleine Zeichnungen auf Papier anfertigen lassen. Die Steuerung erfolgt über ein Arduino-Nano-Board in Verbindung mit einem Bluetooth-Erweiterungsmodul, sodass das Gerät bequem per Android-Smartphone bedient werden kann. Der Roboter wird als Bausatz geliefert, der vom Nutzer selbst montiert werden muss. Eine gedruckte Anleitung ist nicht im Lieferumfang enthalten, kann jedoch aus dem Internet heruntergeladen werden. Der Zusammenbau gestaltet sich in der Regel unkompliziert, sofern auf die korrekte Ausrichtung der Bauteile geachtet wird.
Ähnlich wie die Sanduhr
Der Zeichenroboter funktioniert nach dem gleichen Prinzip wie die Elektor-Sanduhr – das bedeutet, dass er einen Pantografen zur Führung des Stifts verwendet, anstelle eines Schreibkopfes, der sich unabhängig auf X- und Y-Achse bewegt. Diese Konstruktion ermöglicht ein deutlich einfacheres mechanisches Design, da Servomotoren anstelle von Schrittmotoren und Zahnriemen eingesetzt werden können. Die Berechnung der Stiftposition ist jedoch wesentlich komplexer. Zum Glück übernimmt der Arduino Nano diese Aufgabe vollständig.
Der Bausatz wird in einem großen Kunststoffbeutel geliefert, der mehrere kleinere Beutel mit unterschiedlichen Bauteilen enthält. Einer dieser Beutel enthält eine beachtliche Anzahl an Schrauben, Unterlegscheiben und Muttern. Wie sich jedoch nach dem Zusammenbau meines Exemplars herausstellte, wird fast die Hälfte dieser Kleinteile nicht benötigt.
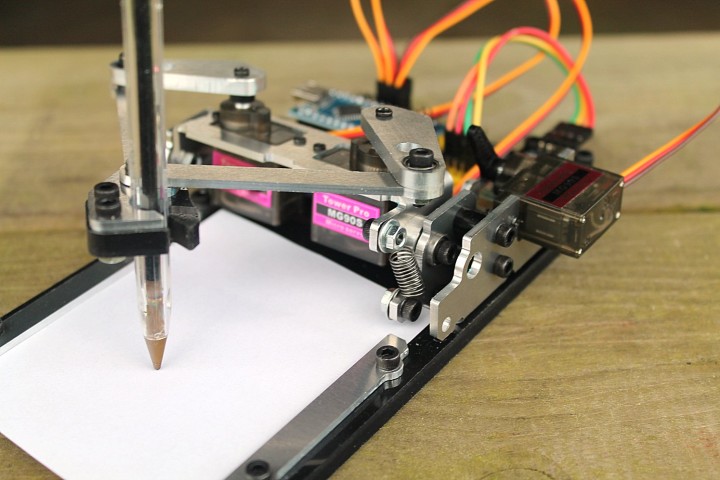
Der Zeichenroboter besteht aus robusten Komponenten
Die Basis des Zeichenroboters bildet eine 5,5 mm starke, präzise bearbeitete Acrylplatte in Schwarz mit den Abmessungen 160 mm × 95 mm. Zwei weitere Teile bestehen ebenfalls aus Acryl: die Halterung für den Stift sowie die Aufnahme für das Bluetooth-Modul. Der Pantograf – also der Arm, der den Stift führt – sowie die Halterungen für die Servos bestehen aus 2 mm starkem Aluminium. Die meisten Schrauben sind Sechskantschrauben; ein passender Inbusschlüssel liegt dem Bausatz bei. Für einige sehr kleine Kreuzschlitzschrauben benötigt man jedoch einen eigenen Schraubendreher.
Wenn man die Montageschritte in der Anleitung genau befolgt, lässt sich der Bausatz problemlos zusammenbauen. Welche Schrauben an welcher Stelle eingesetzt werden und in welcher Anzahl, ist klar und übersichtlich angegeben. Die Bauteile sind präzise gefertigt und passen gut zusammen. Allerdings weisen die Aluminiumteile scharfe Kanten auf, die die Arbeitsoberfläche beschädigen können. Auch ragen einige Schraubenköpfe etwa einen halben Millimeter aus der Unterseite der Grundplatte heraus, was ebenfalls zu Kratzern führen kann. Gummifüße oder selbstklebende Pads zum Schutz der Oberfläche sind im Lieferumfang leider nicht enthalten.
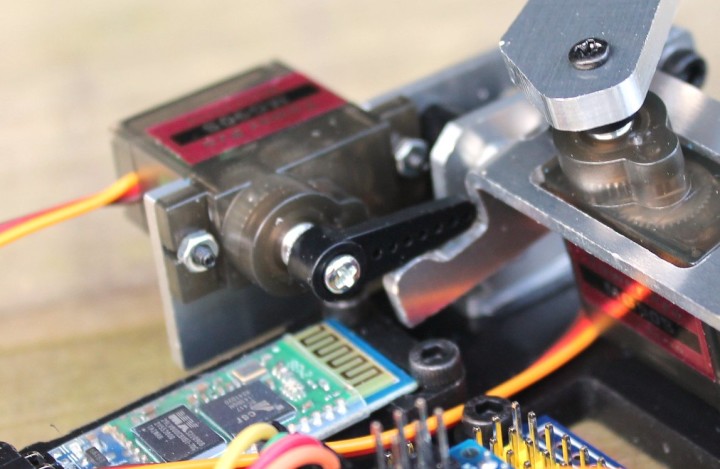
Anschluss des Stift-Servos (Auf/Ab)
Nachdem alle Montageschritte abgeschlossen waren, erklärte die Anleitung den Zeichenroboter für einsatzbereit. In meinem Fall war die Stiftmechanik jedoch noch nicht verbunden – der Roboter war somit nicht in der Lage zu zeichnen. Wie sich herausstellte, fehlt dieser Schritt entweder vollständig in der Anleitung oder ist leicht zu übersehen. Falls es Ihnen ähnlich geht, hier die fehlende Information: Der Kunststoffarm, den man auf den horizontalen Servo an der Seite des Roboters montiert, muss sich in derselben vertikalen Ebene befinden wie der Hebel, der an der Rückseite der Pantograf-Servo-Halterung herausragt – und genau über diesem positioniert sein. In meinem Fall bedeutete das, dass der Kunststoffarm nicht vollständig auf die Achse des Servos gedrückt werden durfte. Ansonsten hätte er den Hebel nicht nach unten drücken können. Der horizontale Servo hebt den Stift an, indem er den Hebel nach unten drückt. Eine Feder – unterstützt durch die Schwerkraft – senkt den Stift beim Zeichnen wieder ab.
Der Zeichenroboter ist vorprogrammiert
Der Zeichenroboter ist bereits vorprogrammiert – das bedeutet, dass Sie ihn nach dem Zusammenbau direkt ausprobieren können. Naja, fast direkt. Zunächst muss auf einem geeigneten Android-Smartphone eine App installiert werden. Diese ist im Download-Paket als APK-Datei enthalten, aber nicht über den Play Store verfügbar. Um die App zu installieren, müssen Sie Ihrem Smartphone erlauben, Anwendungen aus unbekannten Quellen zu installieren. Wie genau dies funktioniert, hängt vom jeweiligen Gerät ab. Zum Glück handelt es sich bei der Zeichen-App nicht um eine fragwürdige Anwendung voller Werbung oder Cloud-Anbindungen. Sie ist lediglich ein einfacher Konverter, der eine Zeichenfläche in serielle Steuerbefehle für den Roboter umwandelt. Allerdings ist die App, offen gesagt, etwas zu einfach gehalten
Mit der Bluetooth App verbinden
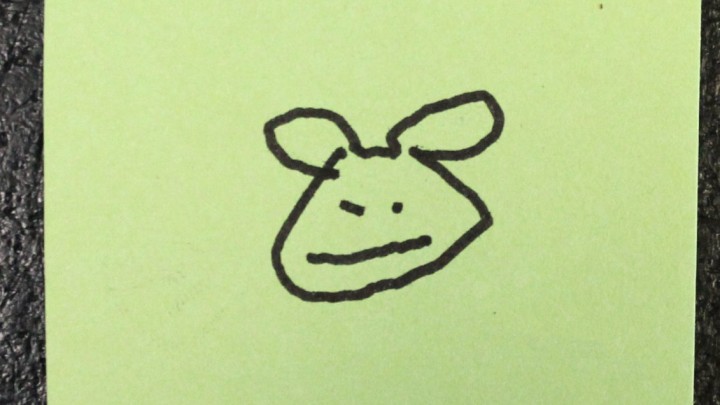
Die Verbindung des Smartphones mit dem Zeichenroboter erfordert zunächst die Kopplung mit dem Bluetooth-Modul. Die App übernimmt diesen Schritt nicht automatisch. Das bedeutet, dass man nach einem Bluetooth-Gerät mit dem Namen „HC-06“ suchen muss. Mein Smartphone forderte anschließend die Eingabe eines PIN-Codes zur Kopplung und schlug „0000“ oder „1234“ vor. Letzterer funktionierte. Nach erfolgreicher Kopplung kann das Gerät in der Zeichen-App ausgewählt werden. Sobald man dann mit dem Finger etwas auf die Zeichenfläche zeichnet, beginnt der Zeichenroboter, die Eingabe nachzufahren. Er ist dabei weder besonders schnell noch besonders präzise, erfüllt seine Aufgabe aber zuverlässig.
Ich habe keine Möglichkeit gefunden, eine Bitmap- oder andere Bilddatei in die App zu laden. Um etwas aufwendigere Zeichnungen zu erstellen, muss man diese daher direkt in der App selbst anfertigen. Das gelingt vermutlich mit einem Eingabestift besser als mit dem Finger. Vor dem Zeichnen sollte der Roboter zunächst getrennt werden. Ist die Zeichnung fertig, verbindet man den Roboter wieder und tippt auf die Schaltfläche „Redraw“, um sie auszuführen. Leider kann man die Zeichnung auch nicht speichern.
Der Zeichenroboter ist Open Source
Im Download ist auch der Arduino-Sketch enthalten, der die über die serielle Schnittstelle empfangenen Befehle in Stiftpositionen umwandelt. Da der Quellcode keinerlei Kommentare enthält, muss man sich das Kommunikationsprotokoll selbst erschließen. Zum Glück zeigt die App die gesendeten Daten an. Es handelt sich dabei um einen ASCII-String, der eine X- und Y-Position (bzw. Winkel) als Fließkommazahlen sowie eine Stift-an/ab-Kennung als Ganzzahl enthält. Die Werte sind durch Kommas getrennt. Ein Befehlsstring endet mit dem Zeichen ‚R‘. Ein Beispielstring lautet: "-42.1,56.9,0,R".
Befehle müssen durch das Zurücksenden des Zeichens ‚N‘ an die App bestätigt werden. Die Übertragungsgeschwindigkeit über die serielle Schnittstelle beträgt 9600 Baud. Wichtig: Wenn ein (geänderter) Sketch auf das Board hochgeladen werden soll, muss das Bluetooth-Modul vorher von der seriellen Schnittstelle getrennt werden, um Konflikte zu vermeiden.
Fazit
Voilà, das war’s. Wenn Sie einen Zeichenroboter suchen, der Ihre Familien- oder Urlaubsfotos in unterhaltsame kleine Zeichnungen umwandeln kann, müssen Sie weitersuchen. Wenn Sie hingegen Interesse daran haben, einen Roboterarm über eine serielle Schnittstelle oder per Bluetooth zu steuern und bereit sind, dafür eigene Software zu schreiben, dann könnte dieser Zeichenroboter genau das Richtige für Sie sein. Er ist kompakt und robust gebaut, verfügt über Servos mit Metallgetriebe und eignet sich hervorragend als langlebige Experimentier- und Lernplattform für Robotik mit Arduino.


Diskussion (0 Kommentare)