
Aufbau des 4tronix M.A.R.S. Rover Kits
über
Inspiriert durch die NASA Mars Rover “Curiosity” und “Perseverance” ist der M.A.R.S. Rover von 4tronix ein autonomes Fahrzeug, das entwickelt wurde, um auf unwegsamen Gelände auf der Erde eingesetzt zu werden. M.A.R.S. verweist in diesem Zusammenhang auch nicht auf unseren Nachbarplaneten im Sonnensystem, sondern ist die Abkürzung für “Mobile Autonomous Robotic System“. Schauen wir uns dieses Produkt einmal genauer an.
M.A.R.S. Rover Kit
Der M.A.R.S. Rover kommt als Bausatz, der ohne Lötarbeiten zusammengesetzt werden kann. Der Bausatz ist komplett und beinhaltet sogar die benötigten Hilfswerkzeuge, aber der erfahrene Hobbyist wird seine eigenen Schraubenzieher den mitgelieferten Exemplaren wahrscheinlich vorziehen. Dieser Bausatz ist in zwei Versionen lieferbar: für Raspberry Pi Zero oder für den BBC micro:bit. Ich habe die Version für den Raspberry Pi gewählt. Es ist dabei wichtig zu wissen, dass der Raspberry Pi respektive der BBC micro:bit nicht im Lieferumfang des Bausatzes enthalten ist und separat bestellt werden muss. Auch die vier benötigten AA-Batterien sind nicht enthalten. Wenn Sie sich für die Raspberry Pi Variante entschieden haben, sollten Sie auch nicht die notwendige microSD-Karte vergessen.
Auf der 4tronix Webseite kann auch ein optionales Tastenfeld bestellt werden, aber das habe ich nicht ausprobiert. Auch ist es möglich, bei der Raspberry Pi Version eine Raspberry Pi Kamera auf der Stange für den Ultraschallwandler zu montieren, aber diese Option habe ich ebenfalls nicht ausprobiert.
Die Schachtel mit dem Bausatz ist überraschend klein (18 cm × 16 cm × 8 cm), aber relativ schwer (600 g) und bis zum Rand gefüllt mit kleinen Plastiksäckchen in denen die Bauteile verpackt sind. Ein Manual wird nicht mitgeliefert, stattdessen wird auf die 4tronix Webseite hingewiesen, wo ausführliche Bau- und Programmieranleitungen vorhanden sind. Ein Computer mit Internetverbindung ist daher sicher hilfreich während der Bauarbeiten an diesem Rover.
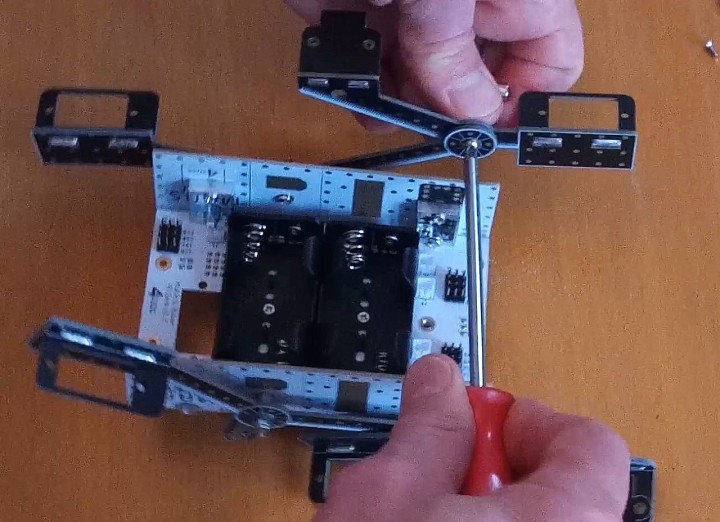
Die Anleitungen sind recht klar und detailliert. Das Zusammensetzen ist nicht schwierig, aber es gibt ein paar knifflige Details. Etwa wenn man die Motorhalterungen festschrauben will, ohne dass die dazugehörigen Muttern immer wieder herausfallen, oder beim Festmachen der Kontermuttern und Anschliessen des Motors. Achten Sie beim Zusammensetzen auch gut auf die Orientierung und Platzierung von bestimmten Teilen wie etwa den Drehgestellen und Servos. Es ist sehr leicht, hier etwas verkehrt zu machen und dann müssen Sie alles wieder auseinandernehmen und neu erledigen. Das ist mir selbst mehrmals passiert.
Ein paar Hinweise zum Bau
Das Zusammenbauen des Rovers dauerte bei mir etwa 2 Stunden; und das war zum Teil dem Umstand geschuldet, dass ich mehrere Fehler machte. Hier sind einige Tipps die helfen können
- Benützen Sie echte Schraubenzieher. Die mitgelieferten Dinger sind eher Spielzeuge.
- Es gibt insgesamt drei 18 mm lange Schrauben die durch die Leiterplatten hindurch gehen. Stellen Sie sicher dass diese gut festgeschraubt sind bevor Sie die Kontermuttern auf der Rückseite montieren. Ansonsten können diese wieder herausfallen, wenn sie die Mutter justieren, um die Teile leicht drehbar zu machen.
- Alle Servo-Stecker sind in der gleichen Richtung ausgerichtet. Sie sind deutlich beschrieben und farbkodiert. Braun entspricht GND (Masse), Gelb ist SIG (Signal). Schreiben Sie die Nummer des jeweiligen Servos (SVx) auf. Das ist hilfreich beim anschließenden Ausführen des Servo-Testprogrammes.
- Der Ultraschallwandlermast kann sich in den Servo-Drähten verheddern, wenn diese nicht gut am Chassis verlegt werden.
- Nachdem die Servos angeschlossen sind, können Sie die überschüssige Drahtlänge durch Herumwickeln um den Servo sauber aufräumen. Andererseits sollten Sie die Drähte für die Antriebsmotoren frei lassen, da sonst die bewegliche Aufhängung blockiert werden könnte.
- Außer wenn man großen Wert auf den optischen Eindruck legt, ist es nicht nötig, die überstehenden Enden der Servo-Hebel abzuschneiden.
Intelligenz & Stromversorgung
Nachdem der Rover zusammengebaut war, habe ich auf dem entsprechendem Stecker auf der Oberseite meinen Raspberry Pi Zero 2W montiert. Ich habe dazu auch noch eine microSD-Karte verwendet, auf der Raspberry Pi Buster OS bereits installiert war. Diese hatte ich in schon einem anderen Projekt eingesetzt, wodurch der Raspberry Pi bereits vorkonfiguriert war und sich direkt mit meinem Wi-Fi Netzwerk verbinden konnte; der SSH-Zugang war ebenfalls schon korrekt konfiguriert. Um Batterien zu sparen habe ich den Raspberry Pi für das Laden und Installieren der Rover-Software aber über USB an meinen Rechner angeschlossen. Die Anleitung wie das gemacht werden muss ist deutlich und detailliert, aber ebenfalls nur online zu finden.
Bei dem Versuch mit einen Raspberry Pi Zero anstatt des Raspberry Pi Zero 2W funktionierte alles genau gleich. Der Raspberry Pi Zero 2W startet aber deutlich schneller, was natürlich ein Vorteil ist.
Der Raspberry Pi kann den Rover nicht speisen. Dafür sind die Batterien notwendig. Wenn Sie beim Ausprobieren der Beispiele daher eine Fehlermeldung sehen, dass der I²C Bus nicht funktioniert, aber Sie sind sicher, dass das auf dem Raspberry Pi korrekt konfiguriert ist, dann müssen Sie den Batterieschalter auf dem Rover kontrollieren. Eine blaue LED gibt an, ob der Rover durch die Batterien mit Strom versorgt wird.
Ich habe die Stromaufnahme gemessen und dabei bin ich auf 400 bis 500 mA gekommen, wenn die Motoren mit dem Testprogramm angesteuert wurden. Wenn die Motoren inaktiv waren, lag die Stromaufnahme bei ungefähr 200 mA.
Programmierung des Rover
Beim Entwickeln von eigenen Programmen für den Rover ist es anzuraten, so viel wie möglich mit der USB-Verbindung zu arbeiten um die Batterien auf dem Rover zu schonen. Schalten Sie den Rover immer erst ein, wenn Sie Ihr Programm testen möchten.
Ich habe alle durch 4tronix vorbereiteten Beispiele ausprobiert und fand dabei keinerlei Probleme. Eigene Programme habe ich nicht erstellt Eine Besonderheit war dass zum Ansteuern der RGB LEDs auf dem Rover das Programm Administratorrechte benötigt. Alle Scripts, die von dieser Funktionalität Gebrauch machen wollen, müssen daher mit sudo ausgeführt werden.
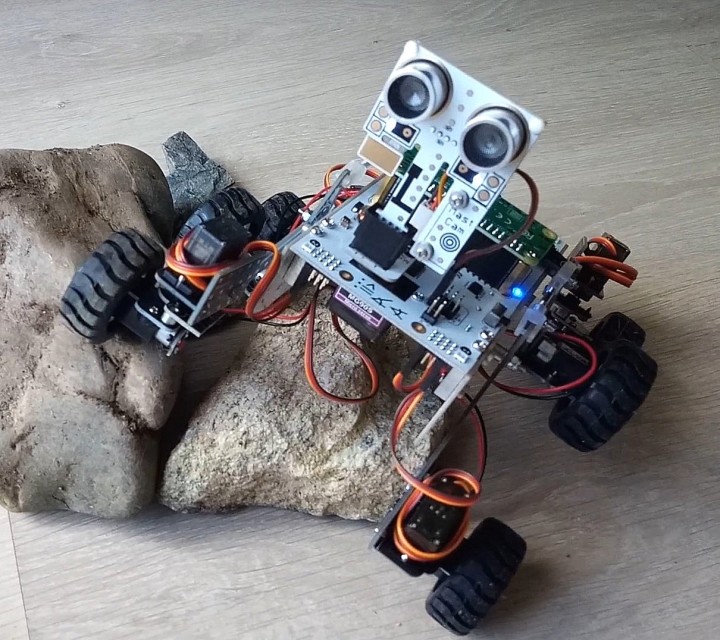
Es ist eindrücklich zu sehen wie man mit dem Rover ohne Probleme über unterschiedliche Hindernisse fahren kann. Es geht gemächlich, aber die bewegliche Aufhängung erlaubt dem Rover problemlos, über die unterschiedlichsten Hindernisse zu klettern.
Ein qualitativ guter Rover
Der 4tronix M.A.R.S. Rover Bausatz ist von hochwertiger Qualität und wenn er vollständig zusammengebaut ist, sieht er dank seinem dekorativen Aufdruck und den Leiterplatten wirklich cool aus. Die Abmessungen betragen 20 cm × 18 cm × 16 cm; er ist damit etwas größer als die Schachtel, in der er geliefert wird. Der Zusammenbau ist ziemlich einfach, da alles gut zusammenpasst (was bei solchen Bausätzen oft keine Selbstverständlichkeit ist) und die Anleitungen sind klar und detailliert. Auch der Gebrauch ist einfach und die Beispiele und Testprogramme können problemlos installiert und ausgeführt werden.
Einmal fertig zusammengebaut und mit installierter Software ist der Rover bereit, die Welt zu erkunden; er ist praktisch unaufhaltbar. Natürlich kann er keine Wände hoch klettern, aber solange die Hindernisse nicht zu hoch werden für die Aufhängearme, kann er sich ohne Probleme darüber hinwegsetzen. Basisprogrammiererfahrung ist natürlich notwendig, wenn man eigene Programme entwickeln will, aber das ist doch der Grund warum Sie sich dieses „Spielzeug” anschaffen wollen, oder?
Bausatzerweiterungen
Die Hauptplatine hat vier extra Montagelöcherm die zum Befestigen von Erweiterungen benützt werden können; und es gibt zusätzliche Stecker für weitere Servos. (Der Plastiksack für Reserveteile in meinem Bausatz enthielt einen Reserve-Servo.)
Ich konnte kein elektrisches Schema finden und kann daher nicht sagen, ob die zusätzlichen Servo-Stecker nicht vielleicht für andere Verwendungszwecke brauchbar sind. Auf der Leiterplatte sind auch zwei weitere I²C Erweiterungsstecker vorhanden, die man z.B. zum Anschließen von Sensoren verwenden könnte.
Übersetzung: Rolf Kalbermatter
Diskussion (0 Kommentare)