
Review: SunFounder Smart Video Car Kit for Raspberry Pi
Verbesserung der Lenkung
Der Test des Autos beginnt mit dem Kalibrieren der Servos. Hier kam es zu einem ernsthaften Problem: Die Lenkung hat schlicht nicht funktioniert. Der Lenk-Servo brummte, aber es passierte nichts. Nach einigen Recherchen stellte sich heraus, dass es an den beiden Kupferabstandshalter neben den Vorderrädern lag. Sie haben exakt die gleiche Länge wie die Acrylteile, die zuvor an den Vorderrädern montiert wurden. Wenn man nun die Muttern zu fest angezogen hat, stecken die Räder fest. Ich löste dieses Problem, indem ich je eine U-Scheibe von 0,5 mm Stärke pro Seite zum Abstandshalter hinzufügte (insgesamt vier Abstandshalter). Nach dieser Verbesserung bewegten sich die Vorderräder frei und die Lenkung funktionierte prima.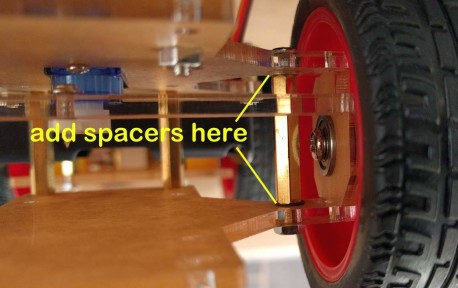
Wenn die Kalibrierung abgeschlossen ist, klicken Sie auf "Confirm", um die Offset-Werte auf dem RPi zu sichern.
Das wars auch schon. Das Handbuch meint: Geh auf die Straße! Dies funktionierte bei mir sofort, also braucht man keine Worte dafür verschwenden.
Android-App
Der Source-Code für eine experimentelle Android-App ist im GitHub-Repository enthalten, das mit App Inventor kompiliert werden soll. Eine kompilierte App kann im Google Play Store heruntergeladen werden (nach Sunfounder suchen). Um sie mit dem RPi zu verwenden, muss zuerst „pip“ und dann „Django“ installiert werden. Die Anweisungen hierzu finden sich auf GitHub (erwähnt wird ein http server, aber es muss wohl html server heißen). Leider wollte die App partout nicht auf meinem Handy (Nexus 5X mit Android 8.1.0) funktionieren.Fazit
Das SunFounder Smart Video Car Kit für Raspberry Pi ist prinzipiell sehr gut gemacht. Die Teile passen (mit der beschriebenen Ausnahme) perfekt, das Handbuch ist großartig und die Software funktioniert einfach. Natürlich gibt es einige kleinere Probleme, aber nichts, was sich nicht leicht lösen lässt. Es sind genügend Schrauben und Muttern enthalten, damit Sie ein oder zwei verlieren können. Schlauch- und Kabelbinder sind sogar ebenfalls im Lieferumfang enthalten, damit Sie Kabel sauber verlegen können.
Wenn ich noch ein Exemplar bauen müsste, würde ich es in dieser Reihenfolge machen:
- Installation der Host-Fernsteuerungssoftware auf dem PC.
- Vorbereitung der RPi-Software und Einrichtung des RPi.
- Testen der Kamera.
- Test der kompletten Verkabelung auf Funktion vor der Befestigung am Auto.
- Zusammenbau des Autos (Servokabel unter RPi führen, genügend Spielraum für Pan- & Tilt-Servos freihalten).
- Test des Autos.
Energieverbrauch
Da der Benutzer die Li-Ion-Batterien besorgen muss, habe ich den Stromverbrauch gemessen:- Motoren bei voller Geschwindigkeit, ohne Kamera: 600 mA @ 7 V
- Motoren bei voller Geschwindigkeit, mit Kamera: 700 mA @ 7 V
- Im Leerlauf mit Kamera: 450 mA @ 7 V
- RPi aus: 100 mA @ 7 V (eventuell einen Schalter hinzufügen)
Mehr anzeigen
Weniger anzeigen
Diskussion (0 Kommentare)